Artificiell intelligens slår för första gången världsmästare i FPV-drönarpilotering

Swift är en algoritm för artificiell intelligens som kan slå mästarna i FPV-drönarpilotering. Den utvecklades av ingenjörer vid universitetet i Zürich.
Det här är vad vi vet
Algoritmen är utformad för att styra drönare. I 15 av 25 tävlingar kunde den artificiella intelligensen slå världsmästarna i FPV-drönarracing och sätta den bästa varvtiden.
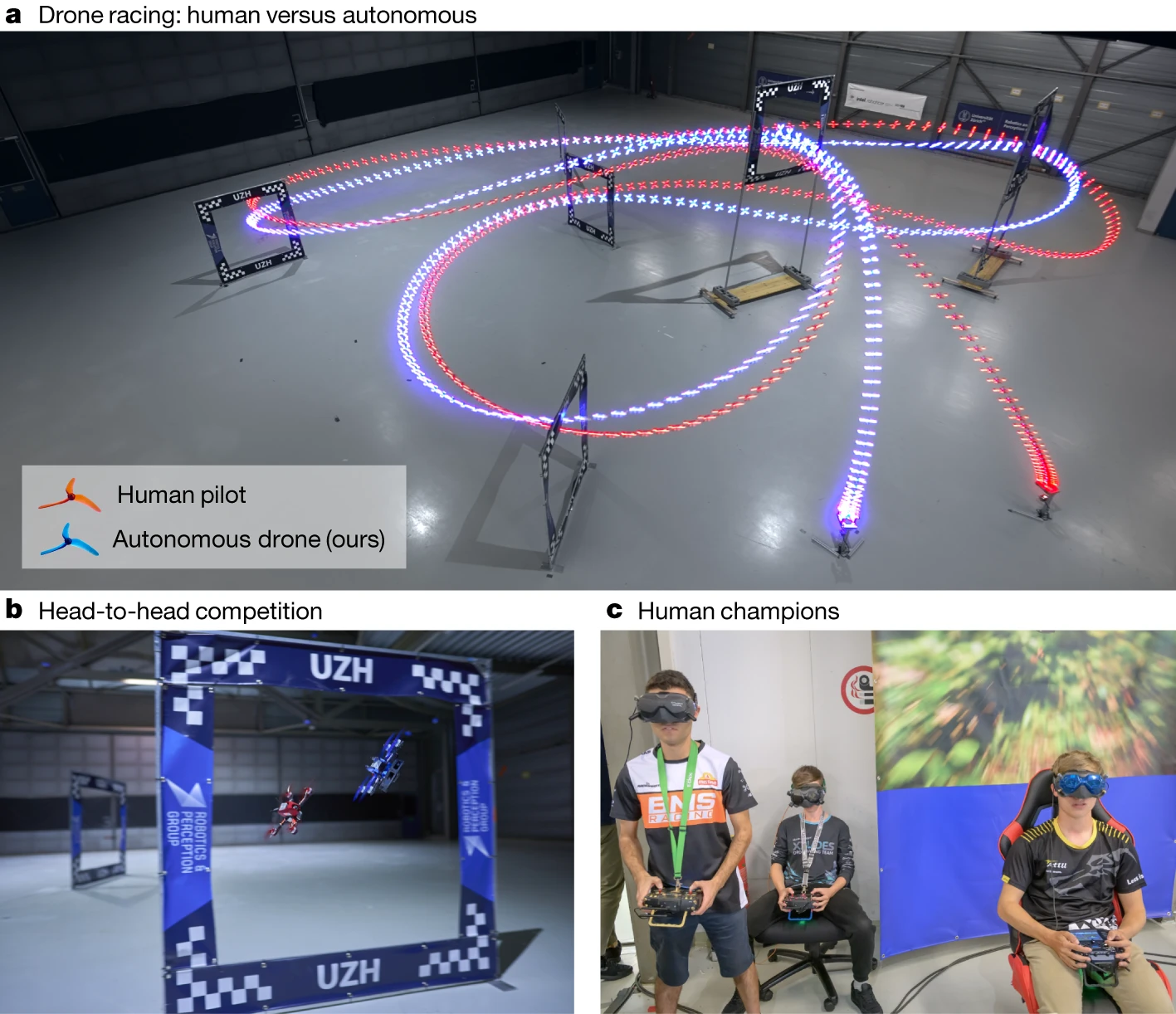
Swift tävlade mot tre mästare i denna disciplin, Alex Vanover, Thomas Bitmatta och Marvin Schäpper. Algoritmen tränades i en simulering där en racerbana återskapades.
En metod som bygger på trial and error användes för att träna den artificiella intelligensen. Detta kallas djup förstärkningsinlärning. Under loppet bearbetade det neurala nätverket data från kameran för att upptäcka den port som UAV:n skulle flyga igenom.
Parallellt samlade ett andra neuralt nätverk in information från en tröghetssensor om UAV:ns hastighet och orientering i rymden. Baserat på dessa data gav den artificiella intelligensen kommandon till FPV UAV.
Som vi noterade ovan vann Swift AI 15 av 25 segrar, dvs. levande människor visade sig vara i 40% av tävlingarna starkare än algoritmen. Samtidigt var den artificiella intelligensen alltid snabbare i början och tog de brantare svängarna.
Ingenjörer vid universitetet i Zürich tror att deras algoritm kan tillämpas i praktiken. Till exempel vid inspektion av byggnader och fartyg, samt vid sök- och räddningsinsatser. Dessutom bör tekniken intressera militären.
Källa: Ars Technica: Ars Technica